|
 |
| 當前位置:首頁 - 綜合技術 |
實物體重復擾動真空引發正電子群傳遞負能的實驗測量文章來源:嘉興市南湖區長軍能源技術研究所 | 發布日期:2010-07-16 | 作者:董長軍 | 點擊次數:
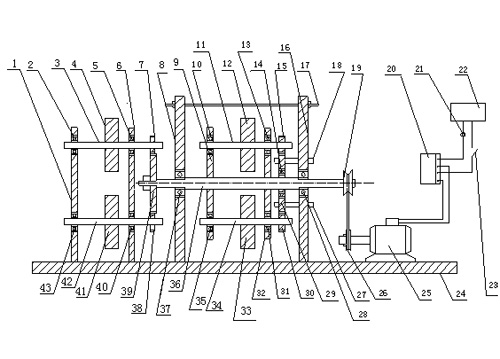
摘要:本實驗以兩個質量相等的軸對稱實物體模擬自轉的地球圍繞太陽中心轉動的機理重復擾動真空,并用電度表和計時秒表對實驗裝置中的實物體相對真空重復擾動和一次擾動所消耗電功率以及慣性轉動的時間分別進行測量。測得:實物體重復擾動真空時慣性轉動時間數值大。實驗顯示:實物體重復擾動真空可引發正電子群向實物體傳遞負能。 關鍵詞:真空, 正電子, 實物體, 負能,慣性轉動。 引 言 保羅•狄拉克(Paul Adrien Maurice Dirac 1902--- 1984)指出:“真空是填滿最低可能能量(負能態正電子)的空間區域”[1]。這些負能態正電子雖然不能從物理實驗中觀察到,但正電子攜帶的負能卻不是不能傳遞的。為驗證負能傳遞的可能性,本文作者制造了一臺實驗裝置[2],現將實驗裝置的結構及實驗過程描述如下,希引起熱衷于尋找新能源的學者對實驗結果共同參與討論。 1.實驗裝置設計的基本思想 基于狄拉克“負能態”空間的觀點,我們認為,負能的傳遞應該與物質的相對運動有關。 例如,某一正能驅動的實物體相對“負能態”空間從一點到另一點的位移運動,正能在實物體相對空間運動的過程中被傳遞到空間,相反,空間中的負能也會在空間相對實物體運動的過程中被反傳遞到實物體。由于實物體的運動軌跡為一條直線或螺旋線即一維運動,因此其對空間只進行一次擾動。實物體相對空間位移的速率V與空間相對實物體位移的速率-V數值相加等于零,正能、負能相互傳遞的效果也等于零,因而,實物體無法從空間中傳遞出多余的負能。 然而,客觀還存在實物體受正能驅動相對空間同時進行不同方向的二次位移(相似于自轉的地球圍繞太陽中心的運動)的運動。在運動過程中,正能、負能必然進行相互傳遞。由于實物體的運動軌跡為2條雙螺旋線即二維運動,因此可對空間進行重復擾動。其位移速率VK=V1+V2,實物體的二維運動所消耗正能E2=1/2mV12+1/2mV22。考慮到“負能態”空間中物質性質的特殊性,空間相對實物體的位移不可能按照雙螺旋的軌跡運動,空間相對實物體的位移會以重復交叉的形式進行。于是,空間相對實物體位移運動的速率-V1、-V2必然會產生疊加效應,所傳遞的負能-E2=1/2m(-V1+-V2)2。這樣,在實物體二維運動的能量系統,正能、負能相互傳遞的效果不等于零(-E2+E≠0),最終得到的數值為負值。因此,二維運動的實物體有可能從空間中傳遞出多余的負能。 筆者設想,制造一臺以兩個質量相等的軸對稱實物體模擬地球繞太陽中心轉動機理而運行的疊加飛輪組機械裝置可以實現飛輪組對空間的重復擾動。 筆者推斷,如果“負能態”空間真實存在,那么,疊加飛輪組機械裝置中的電動機在輸入等數值電功率驅動的情況下,飛輪組重復擾動和一次擾動空間后繞主軸慣性轉動的時間數值就一定不會相等。分別測量兩組實驗中的主軸慣性轉動時間,只要兩組實驗的時間數值不相等,即可證明飛輪組重復擾動能夠從空間中傳遞出多余的負能。 2、實驗機械裝置結構
圖1中(1)為支架B-1,(2)為軸承B-1,(3)為副軸B-1,(4)為飛輪B-1,(5)為軸承B-2,(6)為支架B-2,(7)為驅動齒輪B-1,(8)為主軸支架1,(9)為支架A-1,(10)為軸承A-1,(11)為副軸A-1,(12)為飛輪A-1,(13)為軸承A-2,(14)為導向軸承,(15)為驅動齒輪A-1,(16)為主軸支架2,(17)為螺栓1,(18)為螺栓2,(19)為皮帶輪1,(20)為電度表,(21)為電流表,(22)為電源,(23)為開關,(24)為底座,(25)為電動機,(26)為皮帶輪2,(27)為螺栓3,(28)主軸軸承1,(29)為傳動齒輪2,(30)驅動齒輪A-2,(31)為軸承A-3,(32)為支架A-2。(33)為飛輪A-2,(34)為副軸A-2,(35)軸承A-4,(36)為主軸,(37)主軸軸承2,(38)為驅動齒輪B-2,(39)為傳動齒輪1,(40)為軸承B-3,(41)為飛輪B-2,(42)為副軸B-2,(43)軸承B-4。 支架A-1、A-2的長度L=320mm,兩端分別由軸承A-1、A-2、A-3、A-4固定副軸A-1、A-2,公差配合適中。副軸A-1、A-2中部外徑分別與飛輪A-1、A-2的中心孔固定連接。飛輪A-1、A-2的直徑Φ=148mm,長度L=30mm,重量W=4kg。飛輪A-1、A-2與支架A-1、A-2組合的總質量m=12kg。 副軸A-1、A-2的右端分別與驅動齒輪A-1、A-2的中心孔固定連接。傳動齒輪1由螺栓2、3固定在主軸支架2的內側,其不轉動。傳動齒輪1外徑Φ=195mm,齒數為128齒,傳動齒輪1與驅動齒輪A-1、A-2嚙合,嚙合間隙為0.3mm,驅動齒輪A-1、A-2的外徑Φ=65mm,齒數為42齒。速比為1:3.05。電動機功率為1.5kw,轉速為1400轉/分,以1:1.5轉速比驅動主軸,主軸轉速為2100轉/分。 支架B-1、B-2的長度L=450mm,支架B-1、B-2的下端與底座左邊表面固定連接,支架B-1、B-2的上部由軸承B-1、B-2、B-3、B-4固定副軸B-1、B-2,公差配合適中。副軸B-1、B-2的外徑中部與飛輪B-1、B-2的中心孔內徑固定連接。飛輪B-1、B-2的直徑Φ=148mm,長度L=30mm,質量m=4kg。副軸B-1、B-2的右端外徑與驅動齒輪B-1、B-2的中心孔固定連接,驅動齒輪B-1、B-2的外徑Φ=65mm,齒數為42齒。傳動齒輪2外徑Φ=195mm,齒數為128齒,其中心孔與主軸的左端外徑固定連接,其可隨主軸轉動。傳動齒輪2與驅動齒輪B-1、B-2嚙合,嚙合間隙為0.3mm,速比為1︰3.05。 所述實驗機械裝置的電度表的計量量度數值1kw=625轉
|
|||
|
地址:廣東省廣州市天河區五山能源路2號 聯系電話:020-37206200 郵箱:newenergy@ms.giec.ac.cn 經營許可證編號:粵B2-20050635 粵ICP備:11089167號-4 主辦:中國科學院廣州能源研究所 1998-2013 newenergy.org.cn/newenergy.com.cn Inc. All rights reserved. 中國新能源網 版權所有 |